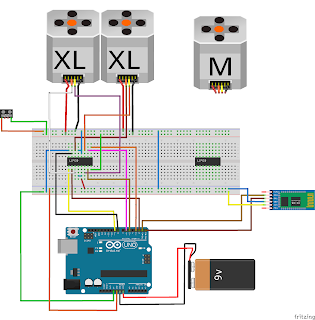
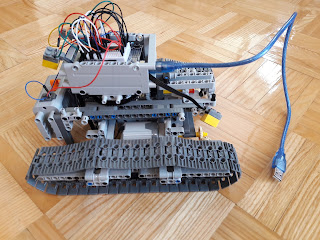
Samochód zdalnie sterowany zbudowałem na zajęciach dodatkowych w szkole dwa lata temu. Tutaj można pobrać opis z zajęć pozalekcyjnych. Lista potrzebnych elementów: podwozie robota - cztery silniki płytka Arduino Nano sterownik silnika L293D - w moim przypadku jest dwukanałowy (pojazd jeździ jak czołg) moduł bluetooth HC05 czujnik odległości HC-SR04 koszyk na baterie przewody połączeniowe przełącznik obrotowy lub suwakowy Schemat: Podłączenie kabli jest też dostępne w opisie powyżej. Postanowiłem wprowadzić kilka poprawek. zmniejszyłem długość kabli połączeniowych, dzięki temu ich ilość bardzo się zmniejszyła zmieniłem program do zdalnej obsługi robota przez program "Arduino Control Car" wstawiłem na zasilaniu przełącznik obrotowy, żeby wyłączać/włączać robota ustabilizowałem położenie silników poprzez ich przyklejenie klejem na gorąco Nagrałem poradnik i umieściłem go na swoim kanale na YouTube, dla tych którzy chcą zbudować robota od zera. P...